ANL-9107 24GHz FMCW雷达液位计概述
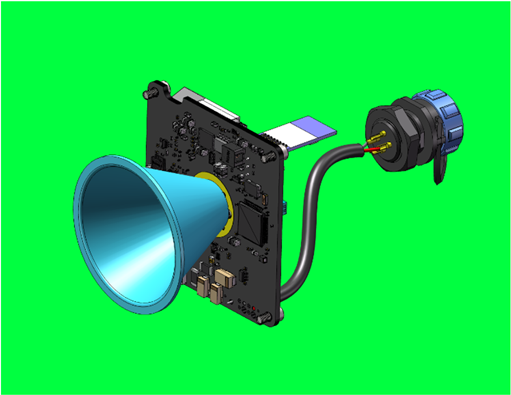
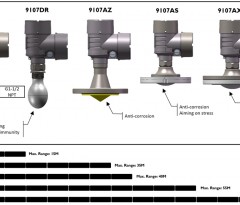
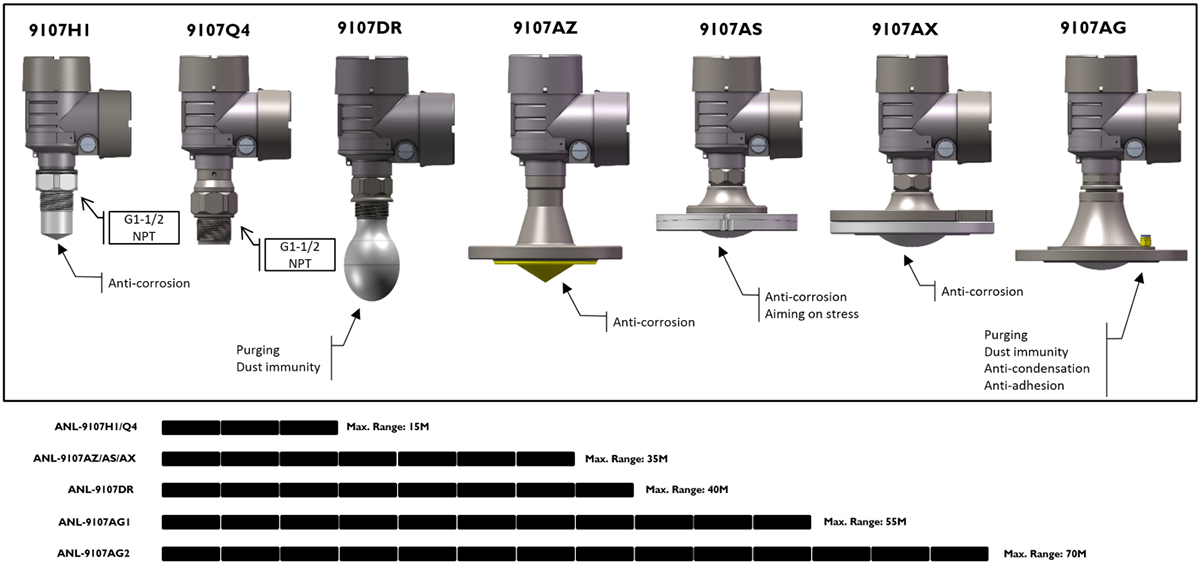
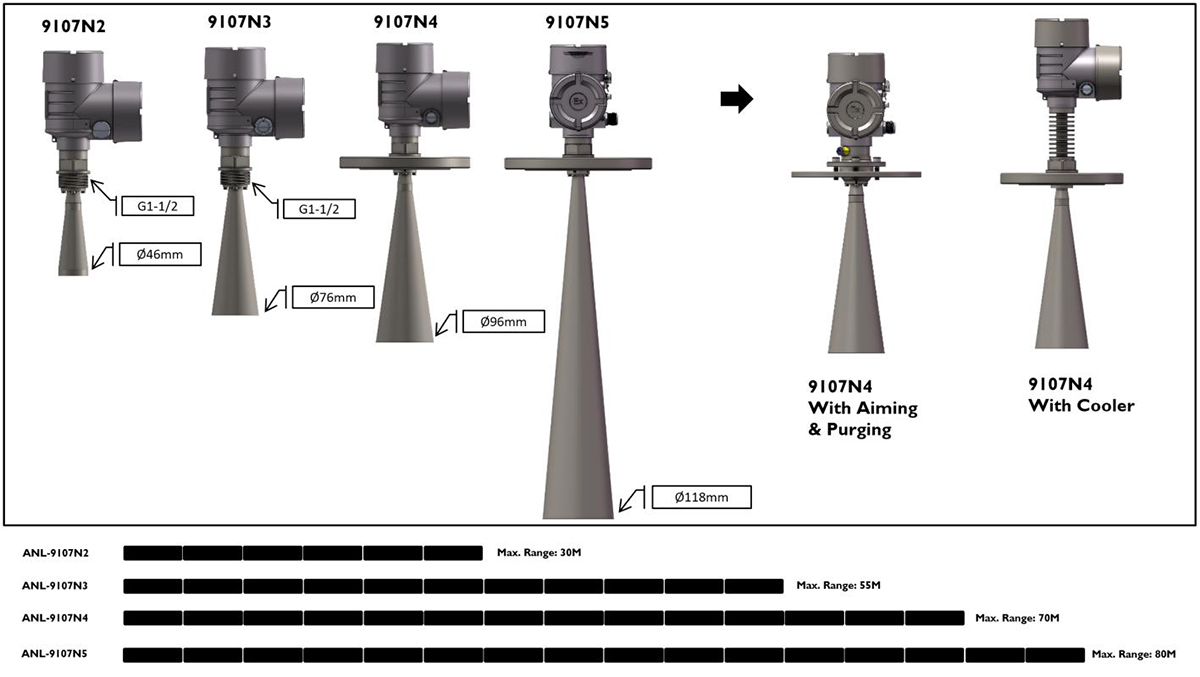
ANL9107系列是一款采用24GHz FMCW(调频连续波)技术的雷达液位变送器,专为高精度液位测量设计。该系列产品包括多种型号(如H1、Q4、DR、AZ、AX、AS、AG等),每种型号均针对特定应用环境进行了优化。ANL9107系列具有出色的测量稳定性和高精度,能够适用于各种液体和固体物料的液位测量。
主要功能特点:
- 高精度测量:采用FMCW雷达技术,实现高达±2mm的测量精度。
- 宽温度范围:支持-40°C至+180°C(部分型号支持更高温度)的过程温度测量。
- 多种材质和防护等级:外壳材质可选塑料、不锈钢或铝合金,防护等级高达IP68,适用于恶劣工业环境。
- 无线通信功能:支持蓝牙5.0通信,便于现场调试和维护。
- 丰富的信号输出:支持4-20mA、HART、Modbus、Profibus等多种通信协议。
应用范围:
- 化工行业的小反应釜、储罐等液位测量。
- 固体物料(如颗粒、粉末)的料位监测。
- 高温、高压、腐蚀性等特殊工况下的液位测量。
- 适用于具有泡沫、蒸汽、尘埃等复杂介质的场合。
| Document Download |
ANL-9107 24GHz FMCW雷达液位计概述
表壳版本
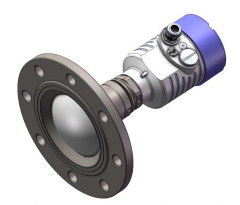
外壳有塑料、不锈钢或铝的单腔或双腔版本。它们的防护等级高达IP 68,工艺密封由FKM、FFKM或石墨制成。对于具有双腔外壳的仪器,可以提供两个辅助电子设备,如无线电模块或电源组。您可以在“可用附件:表壳图纸”中找到可用图纸的完整概述。
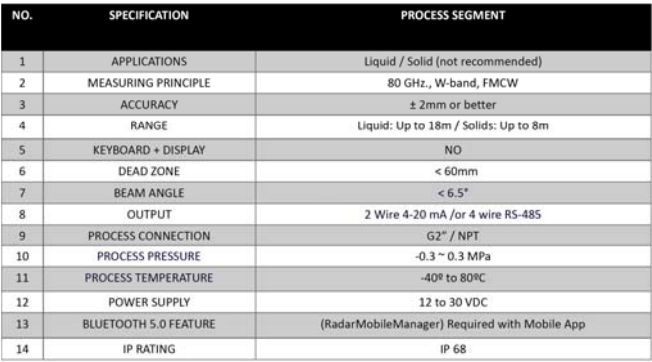
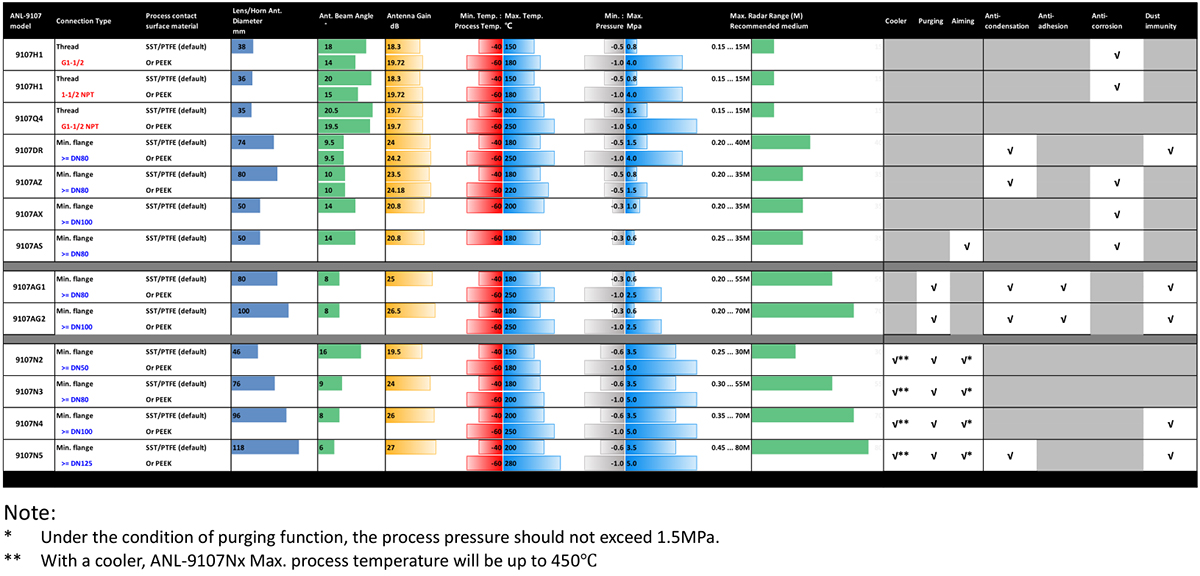
ANL-9107型号参数表汇总 (点击可看高清大图)

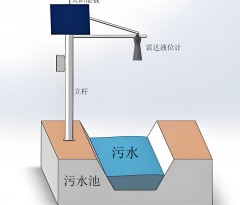
污水处理中的水位监测挑战与雷达水位计的应对之策

污水处理工程是一个复杂而精细的系统,通常包含污水预处理系统、生化处理系统和污泥处理系统三大核心部分。污水预处理系统主要由进水泵、粗细格栅、砂水分离器等设备构成,负责初步净化污水。生化处理系统作为污水处理的核心环节,涵盖了沉淀、絮凝、厌氧、缺氧、好氧等一系列工艺流程,旨在进一步去除污水中的有机物和污染物。而污泥处理系统则包括污泥浓缩池、污泥脱水机等设备,负责处理生化处理过程中产生的污泥,经过匀质、浓缩、脱水、处置等基本工序,实现污泥的有效管理和资源化利用。
在污水处理工程中,涉及多种工艺参数的测量,其中液位测量占据重要地位,几乎在各个工艺阶段都有液位检测点。测量介质主要包括水和用于改善污水水质的溶液,如酸、碱等。相较于其他工艺流程,污水处理工程的水位测量具有其独特性:测量介质通常是含有泥沙、油污等多种无机和有机污染物的污水,且大多存于室外敞口池中;生化处理系统使用气浮工艺的水面上常存在泡沫;同时,调节池、浓缩池等设施还设有搅拌器,进一步增加了测量的复杂性。
针对污水处理工程的特殊环境,市场上存在多种适合其使用的液位计类型,包括接触式和非接触式两大类,涵盖差压式、浮力式、电学式、声学式等多种测量原理。其中,磁翻板液位计、投入式液位计、超声波液位计和雷达液位计等在实际应用中尤为普遍。这些液位计各有特点,为污水处理工程的精准测量提供了丰富的选择,但同时也带来了合理选型的挑战。
特别是水位监测雷达水位计,作为现代科技与测量技术的杰出代表,在污水处理厂中发挥着至关重要的作用。其非接触式测量、高精度和卓越稳定性使其成为该领域的优选方案。从污水进入处理池的那一刻起,直至净化后排出,每一阶段都需要严格的水位监控。水位雷达能够实时、连续地监测污水水位的变化,提供精确的数据反馈,不仅有助于提升污水处理的效率,还能有效预防因水位异常波动引发的各种问题。
在实际应用中,水位监测雷达水位计通常被安装在污水处理厂的关键位置,如沉淀池、曝气池和储水池等。它利用雷达波进行非接触式测量,避免了传统接触式测量方法可能带来的误差和设备损害。同时,这种先进的测量方式还显著降低了维护成本和停机时间,确保了污水处理厂的持续稳定运行。特别值得一提的是,盛博电子的雷达水位计测量精度高达±1mm,远超一般工业测量标准,为污水处理厂提供了更为精确的水位数据支持。
在充满挑战的污水处理厂环境中,电磁干扰和噪声常常对测量精度构成威胁。然而,水位雷达凭借其出色的抗干扰能力,能够有效滤除这些干扰因素,确保每一次测量的准确性,为污水处理厂的稳定运行提供有力保障。

以下是几个具体的应用案例:
案例一:在城市大型污水处理厂中,水位监测雷达水位计被广泛应用于各个处理环节。特别是在沉淀池区域,由于污水中的悬浮物较多,传统接触式水位计易受损且维护成本高。而雷达水位计则凭借其非接触式测量的优势,准确、稳定地监测水位变化,有效避免了设备损坏和误差累积。同时,高精度(±1mm)的测量数据为污水处理工艺的调整提供了有力支持,确保了出水水质达到排放标准。
案例二:一家化工企业的废水处理站面临着废水成分复杂、水位波动大的挑战。为了精准控制废水处理过程,该企业引入了水位监测雷达水位计。该设备不仅能够在恶劣的工业环境中稳定工作,还能实时、连续地监测废水池的水位变化。通过数据分析,操作人员能够及时发现水位异常并采取措施,有效预防了废水溢出或处理不足等问题。此外,雷达水位计的抗干扰能力也确保了测量数据的准确性,为企业的环保合规和生产安全提供了坚实保障。
案例三:在乡村污水处理项目中,由于基础设施相对薄弱且维护力量有限,对水位监测设备的要求更高。某乡村污水处理厂采用了水位监测雷达水位计进行自动化监测。该设备通过远程传输功能,将实时监测数据发送至中央控制室,实现了远程监控和集中管理。这不仅减轻了现场维护人员的工作负担,还提高了污水处理效率。同时,雷达水位计的高精度测量还帮助该厂优化了处理工艺参数,降低了运行成本。
综上所述,水位监测雷达水位计在污水处理厂的应用为现代污水处理带来了极大的便利。它不仅提升了污水处理的效率和质量,还为环境保护事业作出了积极贡献。展望未来,随着科技的不断进步和应用需求的日益增长,我们有理由相信水位雷达将在更多领域发挥更大的价值。当您寻求高精度、高可靠性的物位测量解决方案时,请务必关注福州盛博电子的雷达物位计。
|
|
|
|
|
|
| 型号 | AiW-8260Q0 | AiW-8260H1 | AiW-8260S3 | AiW-8260S4 |
| 频率 | 23.5~26.5GHz | 26.00GHz±250MHz | 26GHz, ±250MHz | 26GHz, ±250MHz |
| 量程 | 0.3~10m | 10m | 10/30/50/70m | 0.6-70m |
| 精度 | ±1mm(4-wire) / ±3mm | ±10mm | ±1mm/±3mm/±5mm | ≤±10mm |
| 信号输出 | 4‐20mA /RS485 | HART/4‐20ma/RS485 |
4‐20mA /2线/4线 (HART/MODBUS/PROFIBUS) |
4‐20mA /2线/4线 (HART/MODBUS/PROFIBUS) |
| 通讯方式 | 4‐20mA / HART / MODBUS |
RS485/HART/ MODBUS |
4-20mA/HART/ MODBUS/PROFIBUS |
4-20mA/HART/ MODBUS/PROFIBUS |
| 故障输出 | 22mA & 20.5mA |
无变化 /22mA /20.5mA/4mA |
22mA & 20.5mA (可选) |
20mA and 20.5mA (可选) |
| 环境温度 | ‐40 ~ 90°C | ‐40..85°C | -40..85°C/-40..200℃ | -40..85°C/-40..200℃ |
| 环境湿度 | ≤95%RH | ≤95%RH | ≤95%RH | ≤95%RH |
| 供电方式 |
2线 9~36VDC 4线 16~45VDC |
2线 9~36VDC 4线 16~45VDC |
2线 9~36VDC 4线 16~45VDC |
2线 9~36VDC 4线 16~45VDC |
| 防爆等级 | IP67 | IP67 | IP67 | IP67 |


AiW-8260x 24GHz-26GHz 系列水文雷达液位计是一款采用先进雷达技术的液位测量设备,具有高精度、非接触式、耐腐蚀等特点。它适用于水文监测、水处理、水利工程、农业灌溉和工业应用等领域,可准确测量水位和流量等参数。这款水文雷达液位计的优点包括非接触式测量,避免了与液体的直接接触,减少了维护和清洁工作;采用耐腐蚀材料和设计,适用于各种水质环境;并且易于安装和维护,设备结构简单,安装方便,维护成本低。超声波做不到的,这个系列都可以。




ANL/AiW-4120系列120GHz FMCW雷达液位计概述
ANL/AiW-4120MP/MC/MP/MG/GX系列智能雷达液位变送器在广泛的过程应用中提供精确的连续液位测量。其多功能的设计使其能够提供适合目的的解决方案和使用灵活性,特别是在化学工业、废水处理和绿色能源应用中。例如,ANL-4120变送器可用于带有小型工艺配件的储罐/容器、腐蚀性环境和露天安装。它经过认证可用于危险场所,并符合NAMUR的建议。对于太阳能或电池供电的应用,建议使用AiW-4120MB系列。该型号支持电源通电时快速输出测量数据(<2s)、瞬时低功耗、低电压、间歇唤醒操作模式,并支持LoRa、IoT通信。特别是,ANL-4120MC非常适合液氮罐测量应用,因为它不需要在LN容器内安装天线,而是直接安装在容器外,而是使用雷达电磁波传输技术来实现液位测量,这已经是一个非常成功的故事。

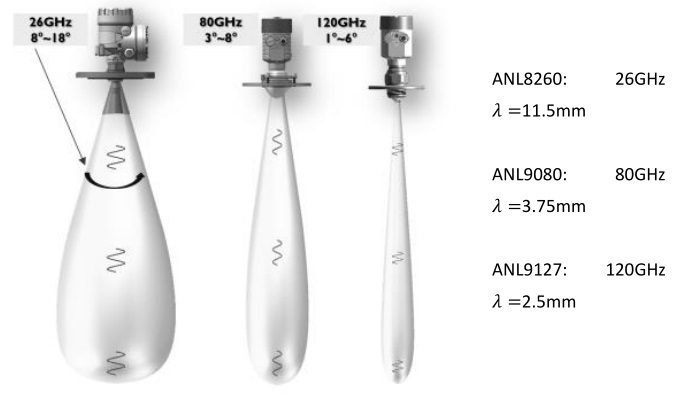
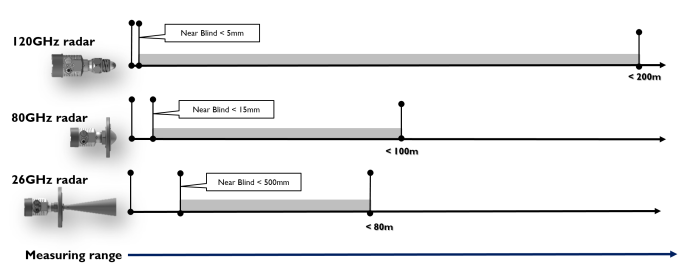
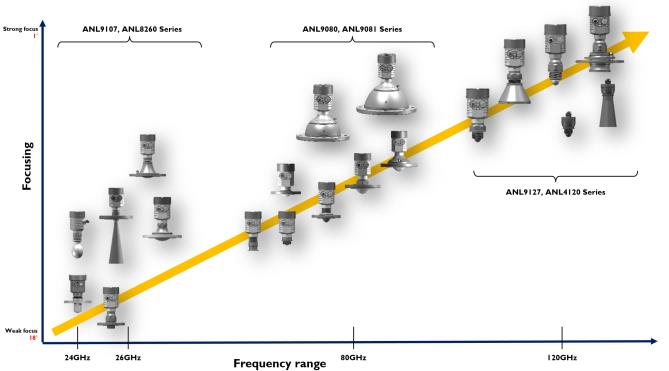
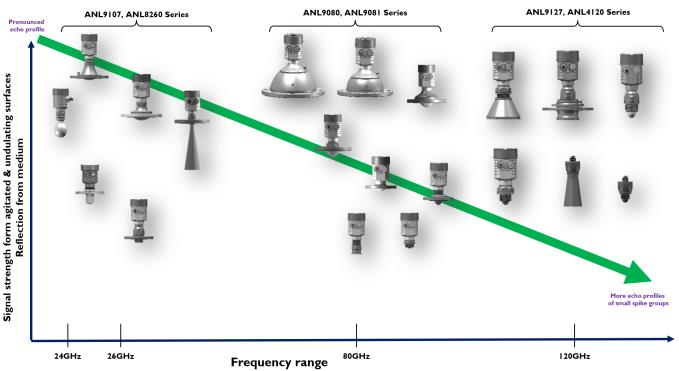
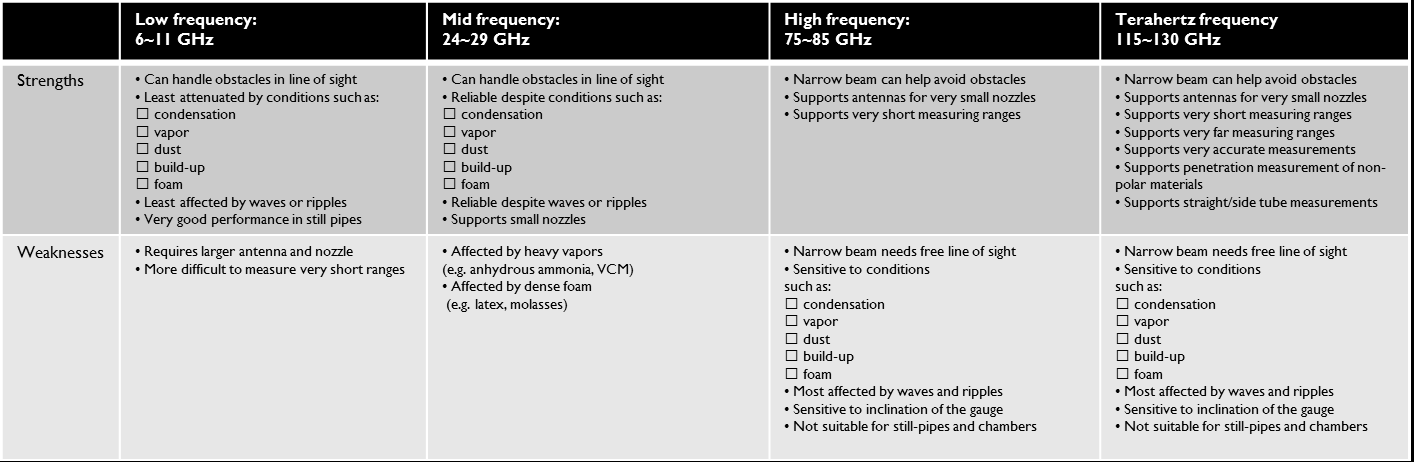
ANL/AiW-4120型号是基于频率为120GHz的FMCW雷达技术的产品。不同的工业雷达液位变送器具有不同的频率,频率会影响测量性能。在没有(或更少)蒸汽和泡沫的情况下进行测量时,由于安装灵活性更大,在大多数正常应用中首选120 GHz频率的雷达液位变送器。然而,在一些重型工业和极端环境中,ANL/AiW-4120型号并不适合。我们为这些应用推荐其他产品。
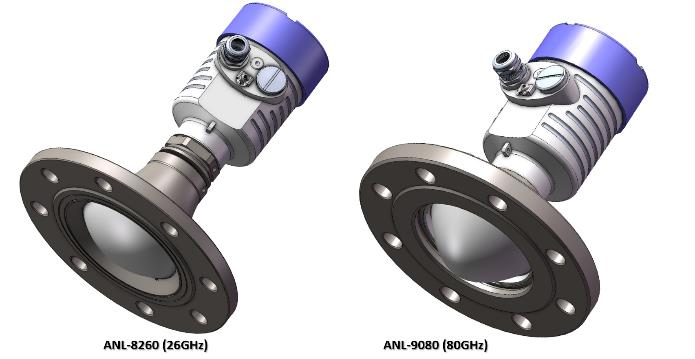
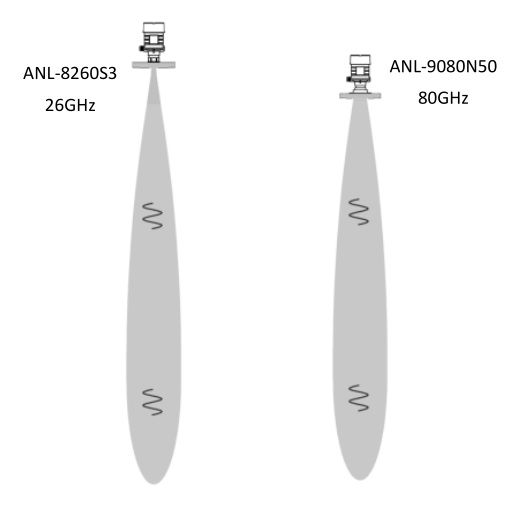
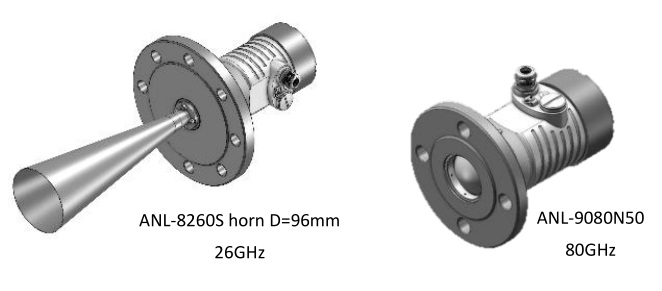
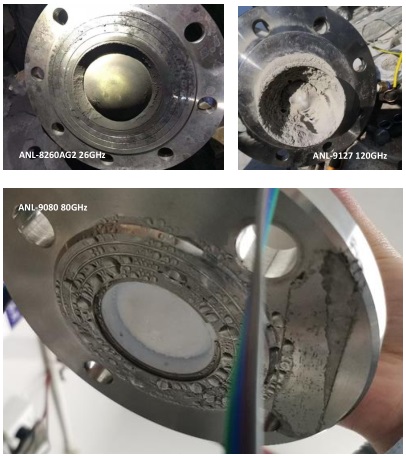
对于大型冶炼、水泥、煤电和采矿业应用,我们建议客户使用基于80GHz和26GHz雷达技术的ANL-9080或ANL-8260雷达产品,这些产品更适合极端环境中的过程应用,特别是高粉尘和污染条件下的固体测量应用。

对于海面探测或传送带上的物料高度测量等应用,我们推荐ANL-9127或ANL-8341产品,它们是用于高速测量的雷达液位变送器,适用于需要<1s响应时间的测量应用。
如果高精度和高速测量的应用是高精度的,建议使用ANL-9107高速和高精度版本的雷达液位变送器产品,该产品基于24GHz FM雷达技术。
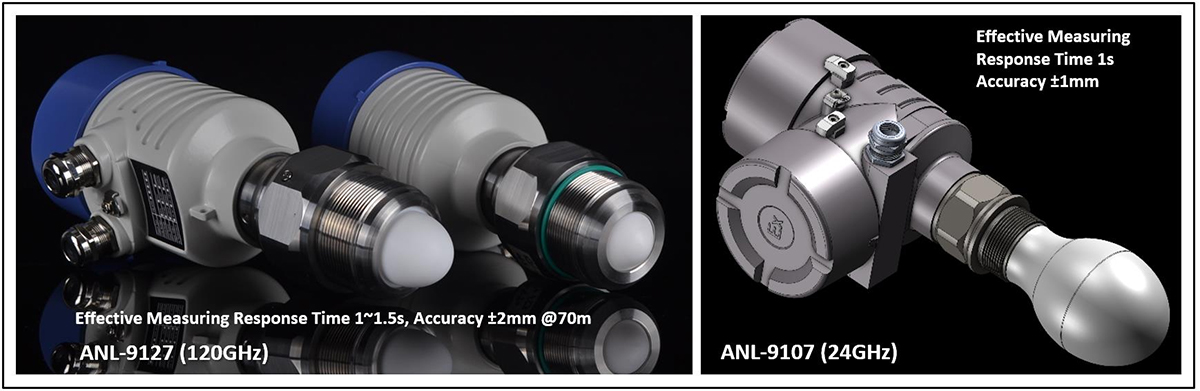
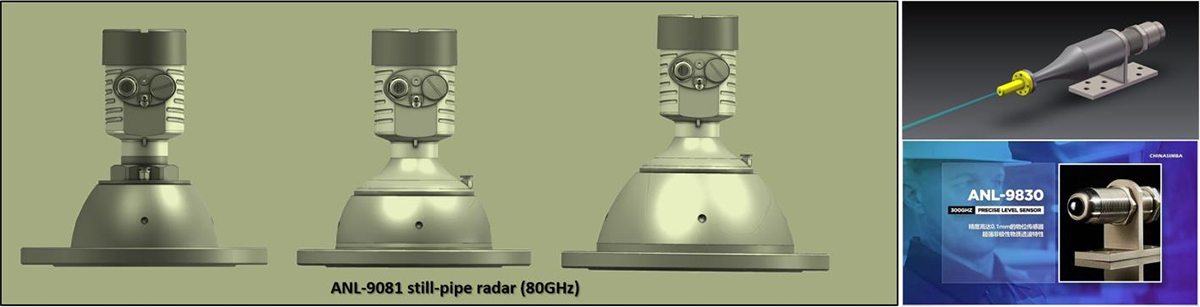
对于浮顶储罐的静管测量,以及有或没有内浮顶应用的汽油/产品罐,建议使用ANL-9081高精度NC雷达型号(80GHz雷达技术)或ANL-9830极高精度数控雷达型号(300GHz雷达技术”)产品。
如需更多产品信息,请联系CHINASIMBA销售经理。

AiW 4120 系列产品:测量原理、安装和调试全攻略
| AiW-4120MP | AiW-4120MC | AiW-4120MK |
|---|---|---|
|
|
|
|



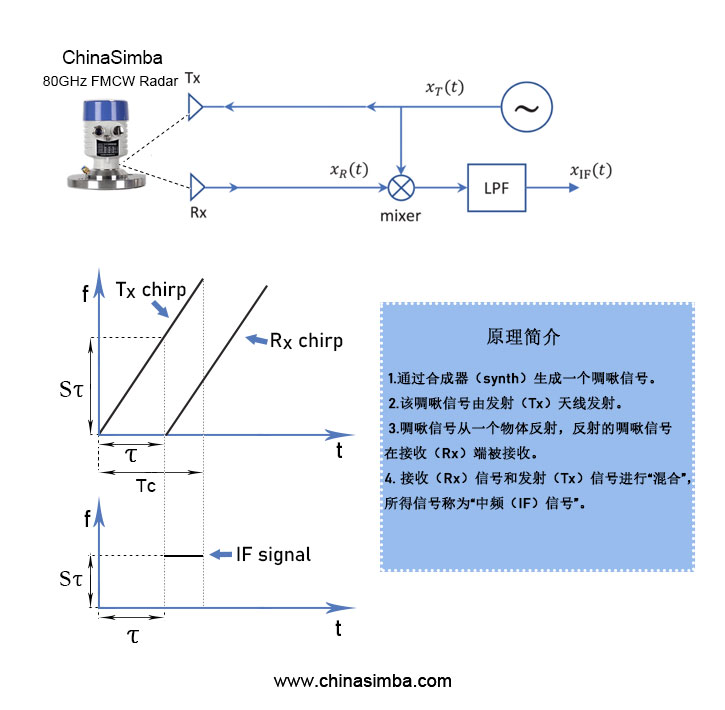
产品测量原理
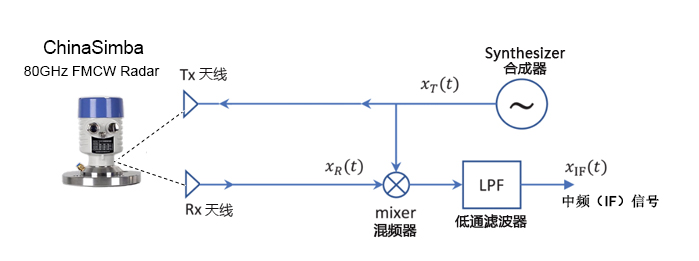
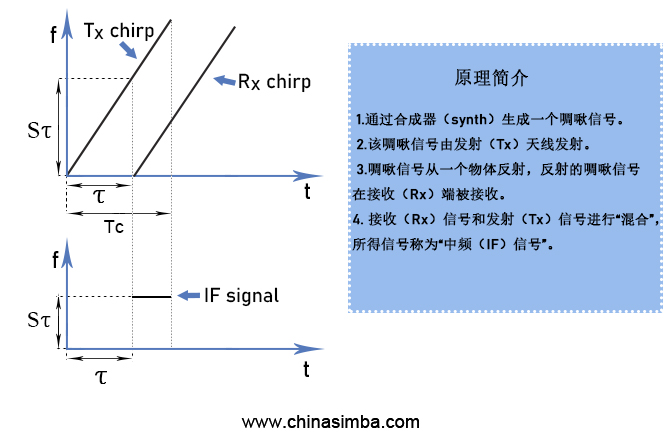
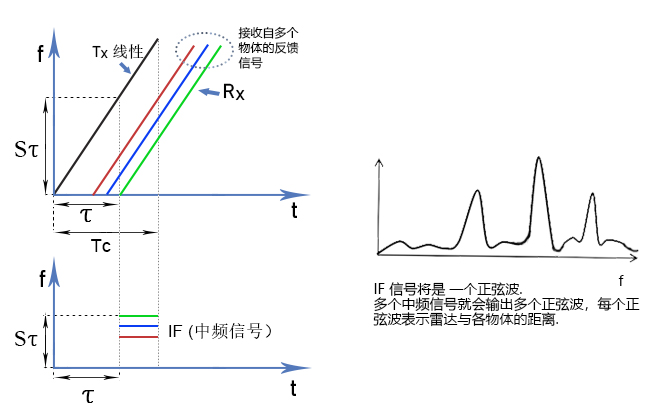
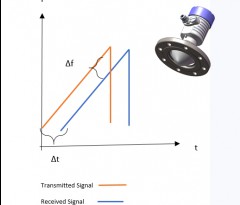
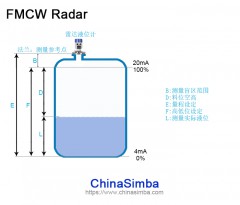
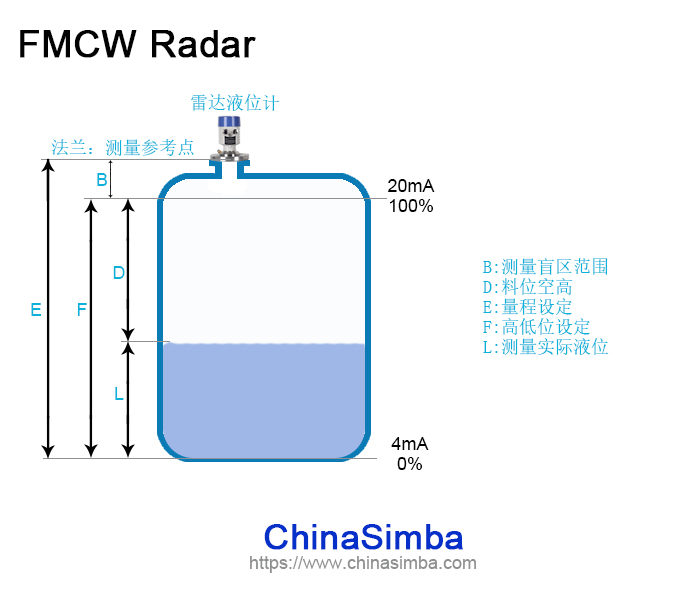
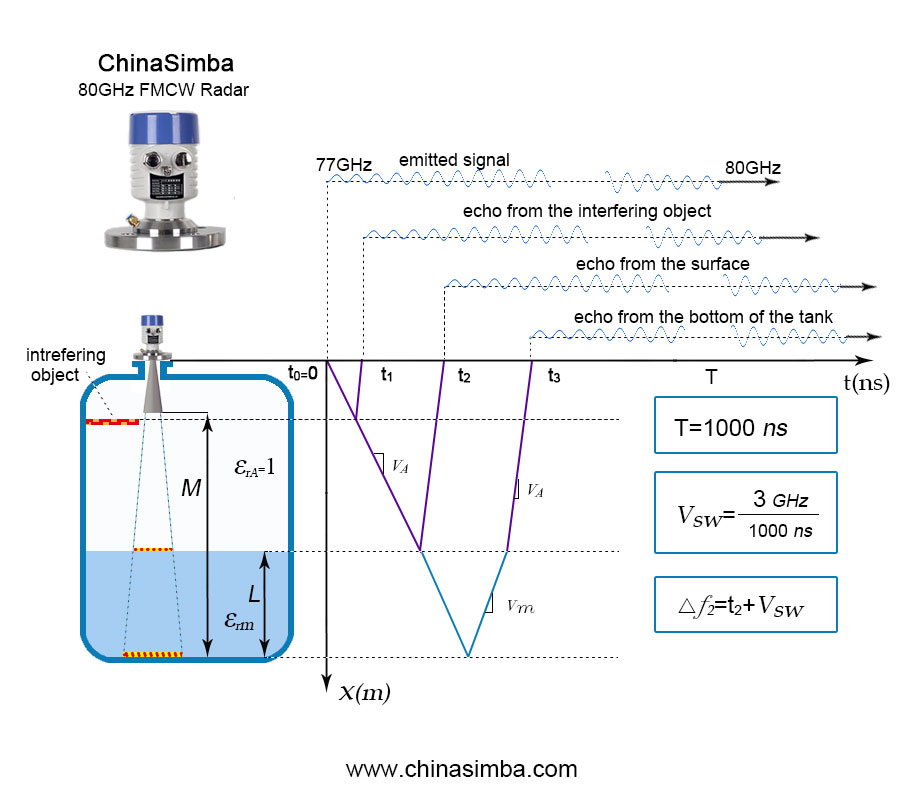
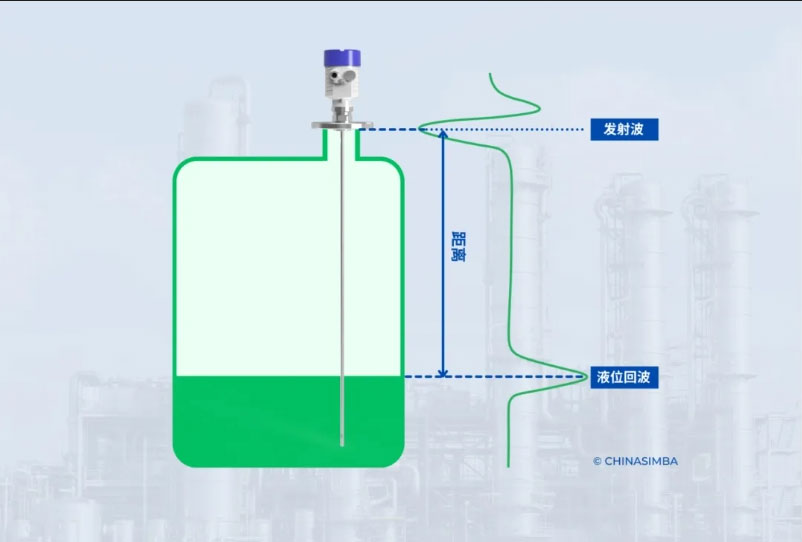
ANL/AiW-4120 产品采用雷达调频连续波距离测量原理进行工作,雷达发射器通过天线发射连续变化的调制频率雷达信号,当发射波信号遇到物体介质时,雷达波信号被反射回来(称之为回波信号)。当回波信号到达雷达,被天线接收时,此时的雷达发射信号频率值与雷达接收到的回波信号频率值就存在一个频率差值;这个频率差值大小与物体距离雷达的距离值成正比,于是频率差值就对应于距离值。
调频连续波雷达物位计的测量原理,就是依据物料的回波信号的频率差值,计算出雷达与物料表面之间的距离。它采用了离散傅里叶变换(Discrete Fourier Transform,DFT)信号分析的方法,傅里叶变换是物位雷达距离测量的核心,通过把信号从时间域变换到频率域进而研究回波信号频谱和变化规律。
距离分辨率
距离测量分辨率是指两个距离相近的物体,雷达能分辨出它们是在不同位置的最小距离。
通俗的解释:距离测量分辨率是指两个物体相距较远的间隔,雷达液位计能够辨别出这是两个物体而不是一个物体并测量它们的距离的能力。
换一句话说就是:如果两个物体之间的距离小于雷达距离测量分辨率的水平,那么雷达可以测量到一个距离值,该距离不等于其中任何一个物体的距离,而是两个物体的距离值的合成值。
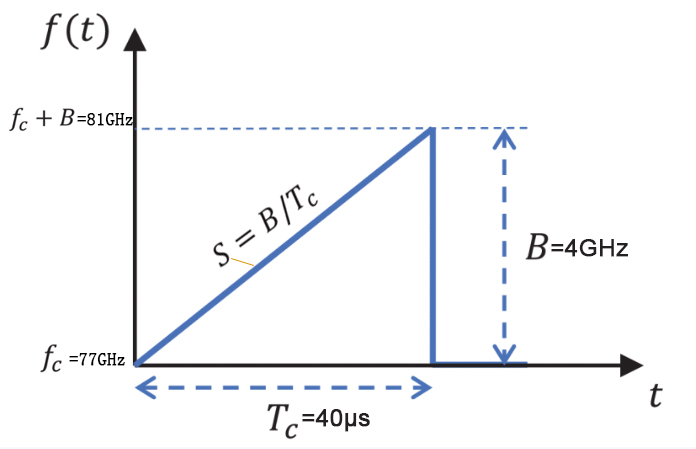
距离测量分辨率取决于离散傅里叶变换运算的频率分辨率 Fres :Fres = 1/T,这里T 是离散傅里叶变换运算的采样时间。频率分辨率Fres的相应距离就是雷达的距离测量分辨率Sres那么,ANL/AiW-4120 雷达的距离分辨率是多少呢?可以通过以下公式计算:Sres = C0 / 2B,
其中: C0是光速 C0 = 299792458m/s,B是调频雷达的扫频带宽,单位Hz,4120产品的扫频带宽为1GHz和3GHz 两种配置。
测量精度
雷达测量精度的含义的:如果有一个物体反射面,当这个物体移动了非常小的距离时,雷达是否可以识别/测量到这个距离的变化的能力。能分辨到移动的最小距离值的度量称为精度。
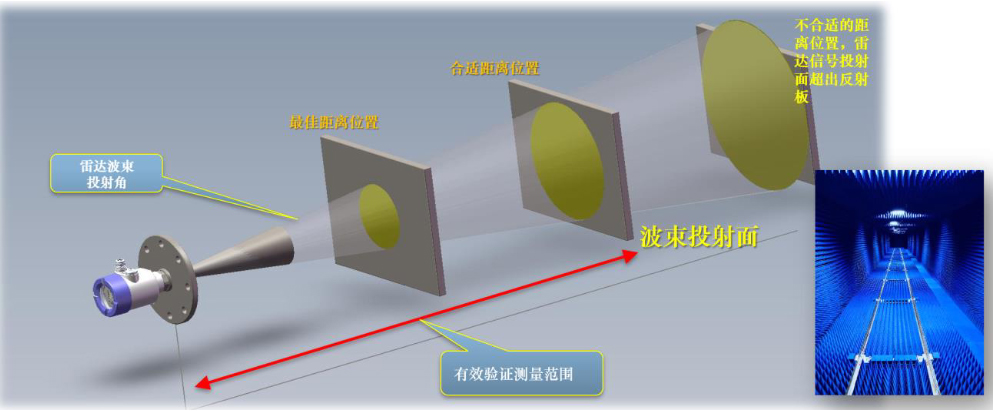
检验雷达的精度需要根据雷达天线的波束角,选择合适大小的反射面进行测量(如上图所示),如果条件许可, 可以在标准化微波暗室进行测量精度验证和标定。
产品安装指南
应用注意事项
ANL/AiW-4120 雷达变送器产品适用于符合 ANSI 61010-1 的标准和扩展的应用环境条件。可以在室内和室外使用。因此在安装之前,请确保选用的变送器产品的所有部件都适合现有的工艺条件。主要是:有源测量组件、过程配件、过程密封等。工艺条件具体包括:工艺压力、工艺温度、介质的化学性质、磨损和机械影响。
注意:如涉及腐蚀性工艺条件,请选择使用 PTFE 材质外壳的 4120 产品。

1:雷达电磁波极化对测量的影响
什么是极化,电磁波在空间传播时,具有同相但彼此垂直的电矢量 E 和磁矢量 B。波的传播方向垂直于电矢量和磁矢量。极化是电磁波的一个固有属性是指电磁波的电矢量 E 的方向轨迹曲线,它的振动方向称为极化方向,这是微波偏振的特性。线性极化方向是由雷达产品的微波模块信号耦合器方向决定的。线性极化具有水平或垂直极化,具体取决于天线或天线的相对方向。工业雷达物位/液位变送器常见的线性极化,它可最大限度地减少过程容器内部结构的虚假回波的影响,这些虚假回波可以从探头、罐内焊缝或搅拌器和挡板反射出来。
雷达产品表现出的线性极化,在雷达物/液位测量中非常重要。在某些应用中通过在连接法兰或凸台上旋转雷达,可以显着降低容器内假回波的影响。如果金属或高介电物体与极化微波的电矢量定向在同一平面上,雷达液位变送器将接收到大幅度回波。如果同一物体与电矢量平面成直角定向,则接收到的回波将具有较小的振幅,如图所示:

注意:当外壳旋转时,偏振方向会发生变化,从而避免虚假回波对测量值的干挠。在雷达产品安装或进行更改时,请记住这一点:
1)雷达发射天线极化 E 的方向角遇到平面障碍物和垂直柱时,会引起巨大的杂散反射,这些障碍物会产生较大的雷达回波信号,而当雷达发射天线极化 E 的方向角遇到在圆形障碍物时,表面上的散射回波只是小振幅的虚假信号。
2)为了减少杂散反射,首先通过旋转雷达产品获得最佳的回波信号(最低虚假回波幅度),然后创建虚假回波曲线。
2:雷达电磁波衍射对测量的影响
通常我们关注雷达产品的波束角(它与雷达天线有关)。这可能会给人一种印象: 即雷达天线可以将电磁波全部聚焦在这个波束内指向一个方向。但事实并非如此,实际上尽管天线被设计为产生定向波束,但天线还会向各个方向辐射一些能量,除了大部分辐射功率在主瓣上外,还有较弱的能量辐射到其他波瓣上。这种现象是由衍射引起的。因此如果雷达产品安装在靠近罐壁或其他罐体障碍物的地方,测量回波信号中就会出现噪声问题。
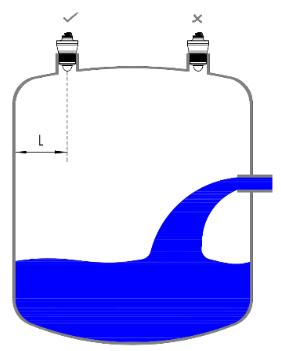
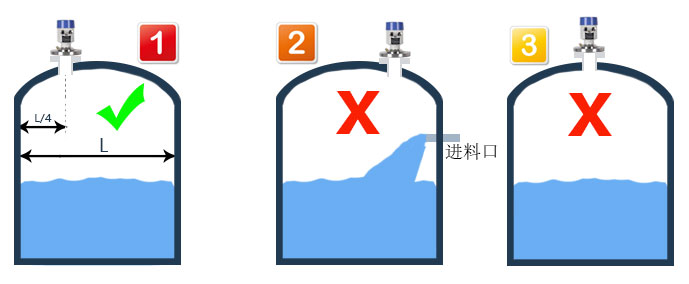
3:安装位置离罐壁最小距离
4120 产品安装点距罐壁的最小距离(L)需要大于 20cm,安装点推荐距离值为罐体半径的 1/2。
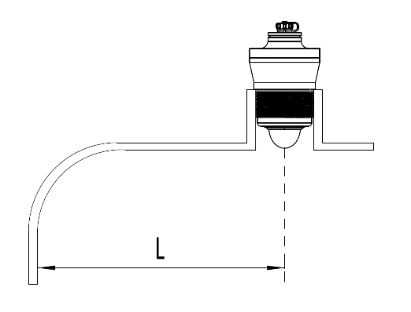
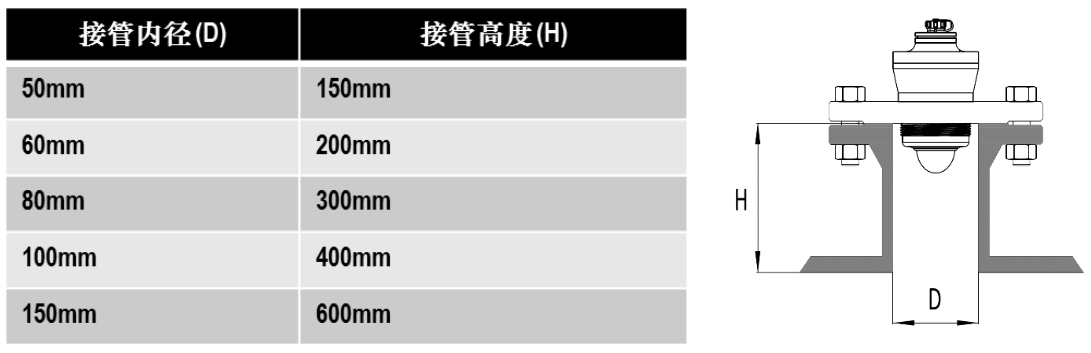
4:接管(喷嘴)长度要求
为了使雷达波能不受干扰地传播,接管(喷嘴)尺寸应保持在下表中给出的指定范围内。接管内部需光滑,避免焊接不良、生锈或沉积物
安装注意事项
在安装变送器之前,请遵循以下安装位置的建议。
1. 安装位置选择
| 雷达变送器在寻找合适的安装位置时,须仔细考察一下储罐的状况,安装ANL/AiW-4120 变送器产品时,请考虑以下准则: • 变送器应安装在储罐顶表面,罐内下部空间清晰畅通,这样可获得最佳的测量性能。 • 变送器应尽可能少地安装在紧靠着储罐壁的位置。 • 请勿将变送器安装在储罐/水箱中央。 • 请勿安装在储罐的入口流附近或上方。 • 请勿将变送器安装在井盖上。 • 请勿将变送器直接放置在侧井门上方。 • 多个 4120 变送器可以在同一罐上使用,雷达信号互不干扰。 |
 |
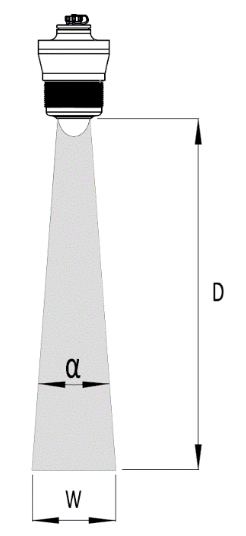
2. 计算天线波束角度投射宽度
|
雷达变送器天线波束照射的罐内底部区域内,应尽可能少有其他罐内结构:梁、管道、焊缝等。 计算雷达变送器天线波束角在不同高度的罐体容器底部的辐射宽度,可按以下计算公式近似计算:W = π x α x D 如果雷达变送器安装在离容器壁太近的地方,可能会产生强烈的干扰信号。同样沉积物、铆钉或焊接接头也会产生干扰信号,它们的回波会叠加在物料真实的回波上。因此,雷达变送器安装位置与罐壁之间必须保持足够的距离。 |
 |
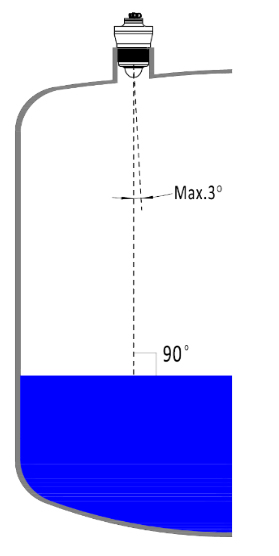
3. 水平倾角和方位朝向调整
ANL/AiW-4120 雷达变送器应垂直安装,以确保产品表面有良好的回波,建议最大倾斜度为 3°,要注意检查法兰接管面是否水平,不够水平时需要采取必要措施来调整,这尤其在液体应用中,大高度罐体应用是特别重要,雷达变送器尽可能垂直于液体介质表面,以获得最佳测量结果。在固体应用中,建议将雷达变送器天线波束对准罐体的下料口区域,以获得最佳测量结果。

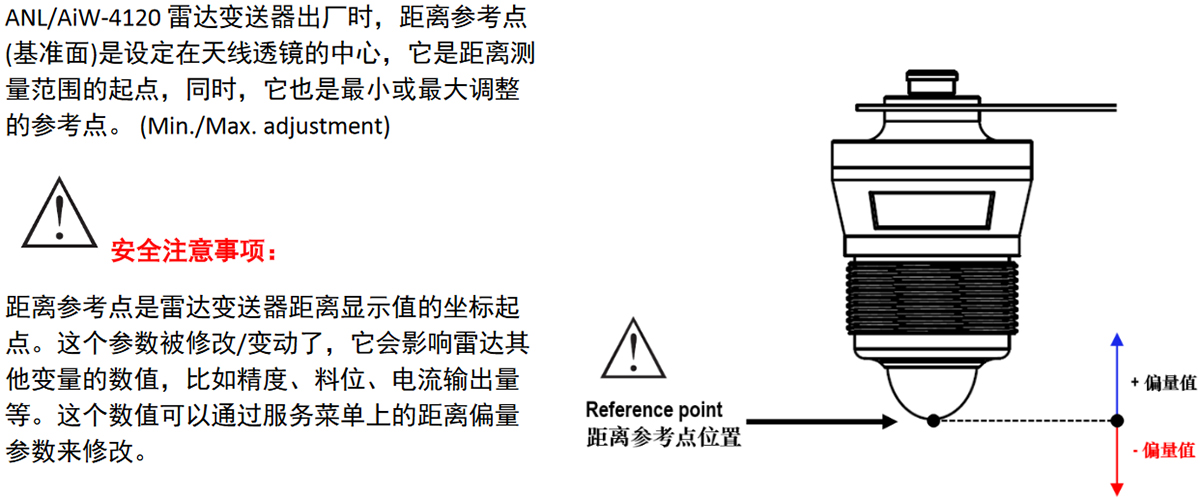
4. 调整距离测量值的参考点(基准面)
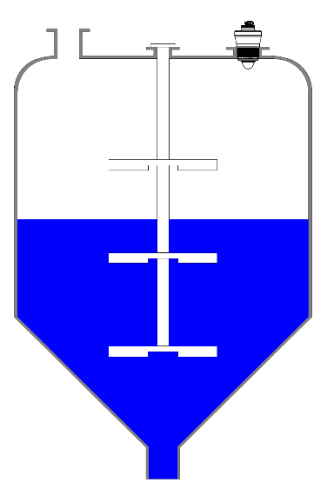
5. 安装工况有搅拌器或泡沫
| 当罐内有搅拌器时,应在搅拌器运动的情况下进行自动假回波抑制。这确保了来自搅拌器不同位置的叶片的干扰反射会一起保存。 罐体容器内中的填充、搅拌和其他过程,可能会在物料介质表面上形成致密的泡沫,这些泡沫会大大抑制发射的信号。如果搅拌产生泡沫或波浪,则应使用特殊的菜单配置参数。请在 ANL/AiW-4120 变送器的菜单项中找到液体/泡沫的参数配置。 如果泡沫导致测量误差,我们建议您使用尽可能大的雷达天线或性能更强的雷达产品规格,例如 ANL-4120MP60 规格雷达或选择其他CHINASIMBA 的大型过程控制工业雷达产品系列。 |
 |
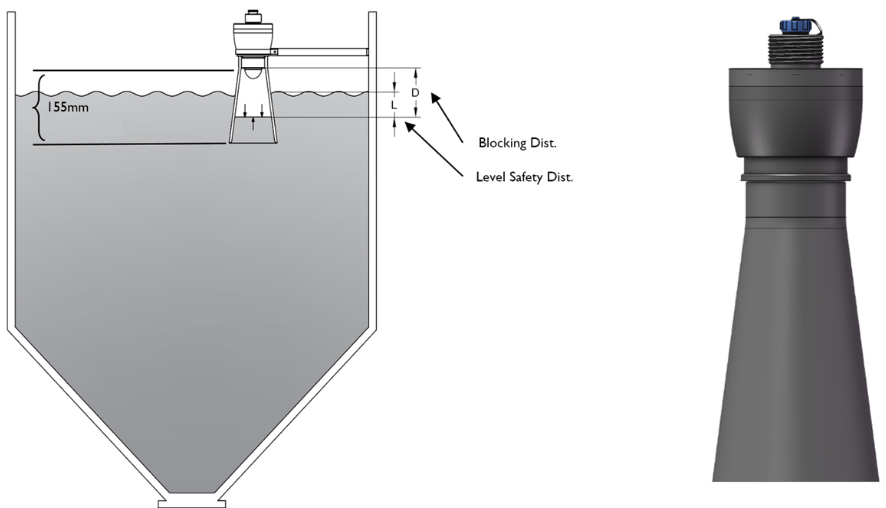
6. 带防溢罩(选配功能)的安装
带防溢功能规格的 AiW-4120 产品配有防溢罩,它具有防物料外溢,能够实时检测液位达到罐容器最顶部情况并触发报警,这通常称为溢流能力。这功能对于防止具有高度腐蚀性、有毒或其他危险的介质的泄漏至关重要。
如果 AiW-4120 雷达产品配置了溢出功能,罐内液位的阻挡距离通常为 140mm(D),雷达会计算估计出液位上升速度和液位报警安全距离(可配置)。请在 AiW-4120 雷达变送器产品的菜单项中找到 Overfill 的参数配置。
| 产品文档下载 |
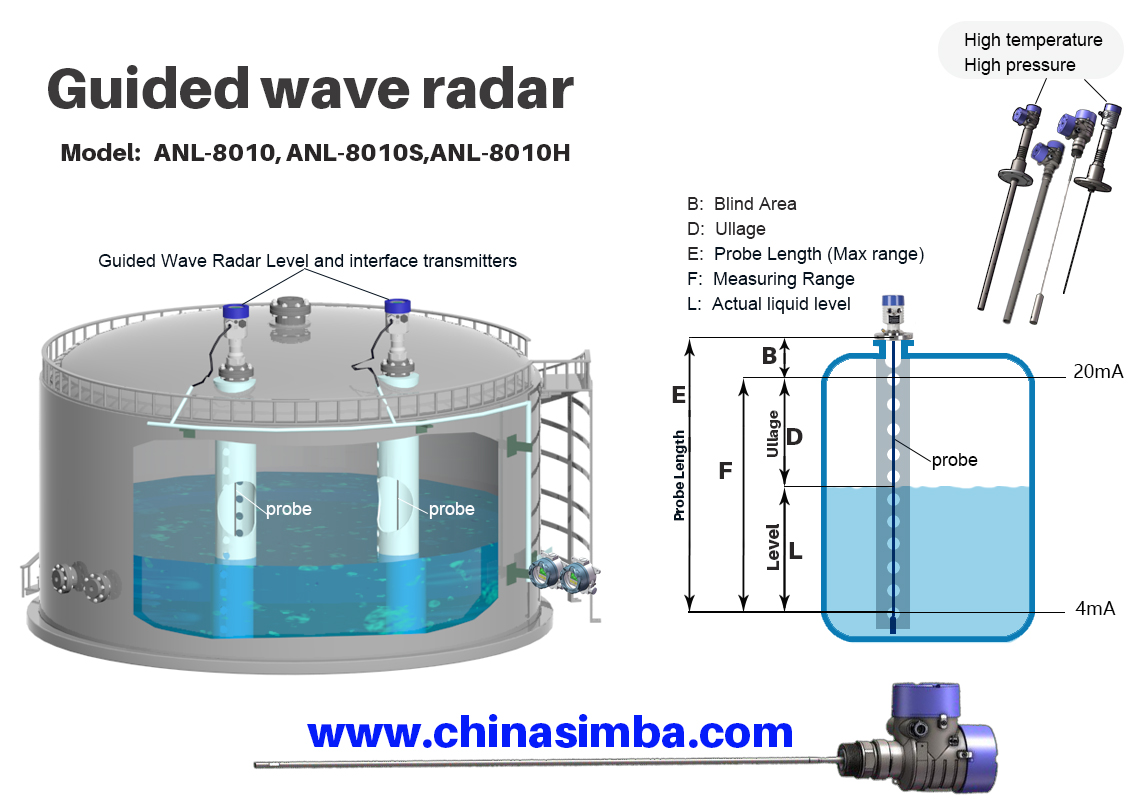
工业雷达过程测量系列之导波雷达物位计 | 盛博

接触式物位测量的历史
HISTORY OF
CONTACT LEVEL MEASUREMENT
接触式测量是一种常见的物理测量方法,它能够通过直接触碰物体表面来获取物体的属性信息,是一种广泛应用于科技、工业和生活领域的经典测量方法。接触式测量方法有着突出的优势,不仅可测量多种物理量,而且精度可控。连续接触式物位测量技术可以追溯到20世纪20年代,为解决燃料油的存储和输送,温德尔·霍尔曼发明了“浮球液位计”装置,但此类设备需要大量维护,使用感受并不理想。随着科技进步与时代变迁,人们对于精度和效率的要求也不断提升。
导波雷达物位计是一种利用电磁波进行物位测量的仪器。20世纪80年代,雷达技术逐渐应用于工业自动化领域。由于传统的物位测量方法,虽然在一定程度上能满足测量需求,但在复杂环境下,准确性和稳定性有所不足。雷达物位测量技术具有适应复杂环境而不受介质影响的突出特点,因而得到了快速发展。
导波雷达物位计测量原理
MEASURING PRINCIPLE
导波雷达物位计是采用TDR(Time Domain Reflectometry)时域反射测量技术的接触式物位测量产品。它的测量原理是,在探杆顶部产生一个可靠的基准脉冲,向缆式或杆式导波杆发射低功率测量脉冲,内置的TDR阶跃脉冲发生器每秒产生约三百万个能量脉冲沿导波杆传输,并传导到达测量介质的表面,将发射脉冲和回波脉冲之间的时间差换算为距离,并由此计算总液位和界面液位。
■ 能耗低
信号直接沿着探杆传输,仅需远低于非接触式雷达物位计的发射能量就可以完成一次测量,信号衰减很小。
■ 接收信号能量强
信号在探杆中传输,能量集中,不受测量环境变化影响,如:汽化环境、液面沸腾、内部障碍物等。
■ 适应范围广
介电常数高低和密度大小的变化不会对测量性能造成影响,应用范围广泛。
■ 可分辨混合液体分离层
导波雷达物位计的探杆可以穿透混合液体的各个介质层,反射回多个信号,可用来分辨混合液体分离层的界面。
因此,导波雷达物位计极大地弥补了非接触式测量方案的不足。
上述的导波雷达物位计特性决定了其测量范围广泛,可以测量不同形状、不同粘稠度、不同介质的物体,如液体、固体、混合液体、浆液等。受环境影响较小,不受温度、湿度、压力、噪音、粉尘、粘附、蒸汽等因素的影响,尤其适用于恶劣环境下的物位和界位的测量。因此,导波雷达物位计被广泛应用于电力、石油和天然气、化工、制药、食品饮料等领域,各类储罐、立管、旁通管的测量。
ANL-8010与ANL-8010H
导波雷达物位计的技术创新
INNOVATION OF ANL-8010/8010H
20年来,通过对工业雷达过程测量技术持续不断的精研和创新,福州盛博电子有限公司出品的通用型导波雷达物位计ANL-8010和高温高压型导波雷达物位计ANL-8010H,实现了多项技术创新和多项技术优势:
01支持极低介电常数介质的测量
通过专用的回波检测电路、软件算法、动态增益控制等手段,可测量DK>1.2的极低介电常数物料。
02陶瓷石墨双重密封技术
在极端严苛的(过程温度范围-196~450℃,或高达40MPa的过程压力)高温高压工况条件下,陶瓷石墨双重密封工艺,为高温高压、有毒介质、危险区域的应用提供安全测量。
03 自动气相校正技术
电磁波在蒸汽状态下传输速度与在空气中的传输速度不同,我司采用自动气相校正补偿技术,有效地消除了蒸汽对液位测量的影响。
04 高分辨率的界面测量技术
可以检测低至10cm的油水分层,以及含有乳化层的界面测量应用,而不受温度和压力变化的影响,为控制系统精确地将多介质层分离提供可靠支撑。
05 罐底反射和末端投影检测算法
通过罐底跟踪和有效地探测探杆末端回波位移等算法,实现不同介电常数介质的测量。
06 工业互联数字化总线技术
支持HART、MODBUS、Profibus、IO-Link、Ethernet-APL等多种工业总线技术,以及更适合于工业现场使用的BLE低功耗Bluetooth蓝牙无线技术,实现仪表的各类参数配置和信号质量监测。
07 状态监测和诊断状态标准化技术
符合NAMUR NE43、NE107合规诊断信息标准,最大化物位测量产品的成本效益,实现最终用户对现场设备的高效化维护和资产管理。
ANL-8010
通用型导波雷达物位计
UNIVERSAL GUIDEDWAVE RADAR
通用型导波雷达物位计ANL-8010,根据探杆的种类分成为四个类型,分别是杆式导波雷达物位计、缆式导波雷达物位计、同轴式导波雷达物位计、卫生防腐型导波雷达物位计。灵活的探杆类型和尺寸结构,适应各类过程应用场合,不受液面波动、粘附、泡沫、介质变化等影响。ANL-8010通用型导波雷达物位计提供多种接液部件可供选择:SS304、SS316L、PEEK、PTFE、PFA等。
| 高温高压款导波雷达变送器 |
| 通用型导波雷达变送器 |
如何更好地了解并选择AiW-3648对水资源的应用处理
如何更好地了解 并选择AiW-3648来进行对水资源的管理
AiW-3648是如何在质量保证的同时做到高性价比的呢?
概述
当我们关注产品在自然水资源、废水处理、市政公用事业管理等行业的应用的同时,更应关注其在日常生活环境中对自然环境温度的适应性、抗紫外线性、海拔高度和防污染性。
■ AiW-3648的天线设计
AiW-3648雷达液位计没有采用传统的透镜天线设计思路,也没有复杂的密封和组装结构设计,我们采取了一些,原创设计旨在克服实际工业应用过程中遇到极端、苛刻的环境(过程温度、压力等)。
AiW-3648的天线采用了顶部狭缝反射镜辐射技术,淘汰了成本昂贵的传统透镜天线设计。天线的整体建设成本仅为0.25USD。而且它也是建在房屋内部,不需要外露(房屋材料为PVDF,具有优异的抗紫外线和抗老化性能)。
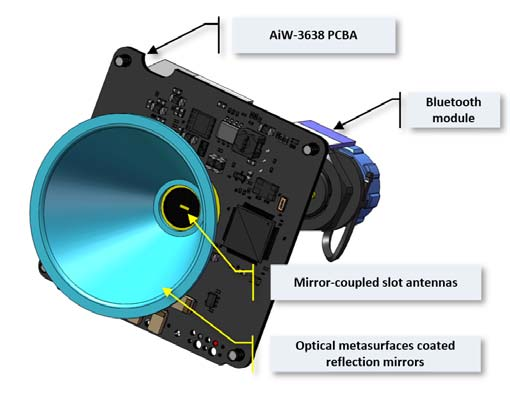
该天线的波束角为7˚、增益为18dB,其性能足以测量20M范围内的液体/固体液位。